In this tutorial, there will be several tasks running in parallel in Skelix, and each task use its own LDT, we are going to implement preemptively task switching.
At first let's clarify one opinion, running multiple tasks concurrently on one single processor(one core) is not going to happen, in reality, the processor switches
tasks very fast, say 100 times per second, so it looks like several processes are running at the same time.
The 386 processor has hardware support for multitasking, but certainly it also can be accomplished manually, here is a program I wrote before, it switches the execution of several code snippets.
We all know there is only one set of registers in every single CPU, and they are used by all processes, so when a running processes is stopped and before it is switched to another process,
all the informations about this process which are registers and some other information relate to them should be stored, because another process is going to use them.
This information called "context" in general, and the 386 processor use the task state segments (TSS) to store this information,
which is at least 104 bytes long, and a TSS descriptor refers to it. TSS descriptors only appear in the GDT, that means a user task
can not switch to any specific process by itself via LDT. When we switch processes in the hardware way, the processor stores all informations in the TSS automatically.
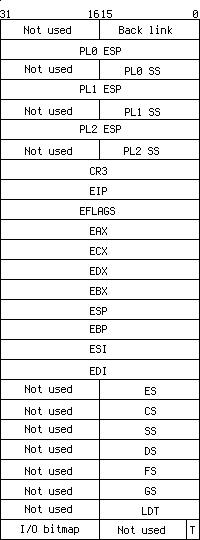
The TSS defines the state of the execution environment for a task. Now let's take a look at the TSS structure,
It is a big table, but it is not that scary if you look into it. For those "not used" fields, they are reserved by Intel. The 386 processor supports
nested task, that means when task 1 switch to task 2, then the "Back link" field of task 2 is set to the selector of task 1 and the NT(Nested Task) bit in its
EFLAGS is set as well, so when task 2 returns, the processor knows which task is going to take control. We know that the 386
processor supports 4 different privileges, and TSS allows each privilege uses different stacks when task switching, so there are 4 different stacks
for one process can be used. We are going to talk about CR3 register in following tutorials. We are going to talk about
LDT in a short while. About I/O bitmap an T bit, we don't care about them at this moment.
Like other descriptors in GDT, the TSS also need a descriptor in GDT refer to it, here is its format,
General GDT descriptor,
We can compare it to a general segment descriptor, we can see the D(data or code segment) and X(not used) bits are set to zero, the AVL
bit is available to users. The type is 010B, the B(bit 41) is the busy bit of this TSS descriptor, because one process can only own one TSS,
so once it is executing, the B bit of its descriptor is set to indicate its TSS can not be used any more just in case of the
reentrant. A(access) is set to 1, but the TSS can neither be read nor written by processes even A bit is set to writable. Other field of the
descriptor have the same meaning compares to normal data and code segments, just one thing we have to know, the limit field of the descriptor must can
present a memory space that at least 104 bytes long which is the minimum length of TSS. There is another thing I have to mention, in
reality most OS use software context switching because hardware context switching just save the registers we mentioned above, but not include
FPU, MMX, SSE etc. Since we are not going to use them in Skelix,
so it is safe to use TSS to do environment saving.
In this tutorial, DPL fields of TSS descriptors are going to be set to zero, so that only the kernel has the right to perform task switching.
Just like GDTR and IDTR, TSS descriptors also has its own specific register
for task switching, called TR, it can be loaded to this register by instruction LTR. And the selector
refers to TSS descriptor in GDT can not be load into any other segment registers, or an exception will occur.
There are several ways to perform task switching, and we are going to use a far jump to a TSS descriptor in GDT to achieve it.
All those boring stuffs I mentioned above serve for this purpose. If you want to find out alternate ways to do it, you'd better read some code from wherever possible,
because there are really only few books on this topic.
During task switching, the processor first stores the context of current task in the current TSS, then loads the task register of the new task,
then loads the context of the new task from the new TSS with the new task's descriptor in GDT, finally executes the new task.
Let's take a look at the code, this is the TSS structure we are going to use,
06/include/task.h
struct TSS_STRUCT {
unsignedint back_link;
unsignedint esp0, ss0;
unsignedint esp1, ss1;
unsignedint esp2, ss2;
unsignedint cr3;
unsignedint eip;
unsignedint eflags;
unsignedint eax,ecx,edx,ebx;
unsignedint esp, ebp;
unsignedint esi, edi;
unsignedint es, cs, ss, ds, fs, gs;
unsignedint ldt;
unsignedint trace_bitmap;
};
It is exactly the same as the TSS structure I mentioned above, but because this structure is going to be used by the processor, so it has to be
104 bytes long and no paddings in it, if you use IA-64 or other arches or other compilers, check documents youself.
For a working OS, those information are not enough, so anothing structure TASK_STRUCT is used to wrap TSS structure.
#define TS_RUNNING 0
#define TS_RUNABLE 1
#define TS_STOPPED 2
struct TASK_STRUCT {
struct TSS_STRUCT tss;
unsignedlonglong tss_entry;
unsignedlonglong ldt[2];
unsignedlonglong ldt_entry;
int state;
int priority;
struct TASK_STRUCT *next;
};
#define DEFAULT_LDT_CODE 0x00cffa000000ffffULL
#define DEFAULT_LDT_DATA 0x00cff2000000ffffULL
#define INITIAL_PRIO 200
This is all we need at this moment, those TS_* stuff defines all states that a process can be at.
The tss_entry in TASK_STRUCT defines the descriptor of the tss field in this structure, I am going to explain it in a short while.
Two *ldt* fields will be explained later on. state field store the current state of this process,
which is one of those TS_*. priority indicates the sequence of the execution of processes in system,
and the new task will be given a initial priority INITIAL_PRIO. All tasks in Skelix are managed as a link, the next field defines the next task in the link.
Now let's look at an example, this is the TASK_STRUCT structure for task 0, that is the first task in system, when kernel finishes all initialization, it becomes task 0.
staticunsignedlong TASK0_STACK[256] = {0xf};
This is the stack used as the CPL0 stack for task 0. Whitout that 0xF, I encountered a problem during my compiling, if it is just initialized like static unsigned long TASK0_STACK[256];
then this memory area just vanishes (Shen Feng explains, without 0xF, TASK0_STACK[256] would be an zero-initialized static data, and it would be in
.bss section, and the object file only record its length and start address etc.. That's why a nonzero value has to be used to keep it in .data section.)
Make esp0 points to the "bottom" of the stack. DATA_SEL and CODE_SEL
appears in next few lines are defined at 06/include/kernel.h, they are selectors of data and code segments in GDT.
/* esp1 ss1 esp2 ss2 */
0, 0, 0, 0,
/* cr3 */
0,
/* eip eflags */
0, 0,
/* eax ecx edx ebx */
0, 0, 0, 0,
/* esp ebp */
0, 0,
/* esi edi */
0, 0,
/* es cs ds */
USER_DATA_SEL, USER_CODE_SEL, USER_DATA_SEL,
/* ss fs gs */
USER_DATA_SEL, USER_DATA_SEL, USER_DATA_SEL,
/* ldt */
0x20,
/* trace_bitmap */
0x00000000},
/* tss_entry */
0,
/* idt[2] */
{DEFAULT_LDT_CODE, DEFAULT_LDT_DATA},
/* idt_entry */
0,
/* state */
TS_RUNNING,
/* priority */
INITIAL_PRIO,
/* next */
0,
};
Now we have the TSS, we are going to create a TSS descriptor, remember there are two reserved place in GDT.
06/bootsect.s
gdt:
.quad 0x0000000000000000 # null descriptor
.quad 0x00cf9a000000ffff # cs
.quad 0x00cf92000000ffff # ds
.quad 0x0000000000000000 # reserved for tss
.quad 0x0000000000000000 # reserved for ldt
The forth entry(0x3) are reserved for TSS of current running task, so a macro CURR_TASK_TSS = 3 has been defined as an index refers to this position in GDT.
We are going to let the current task uses this place, once it gives up the control, it saves its descriptor in its tss_entry of TASK_STRUCT.
When a new task takes over the control, it loads its own TSS descriptor from its TASK_STRUCT to this place. In this way, we can allow unlimited tasks works in system.
Because there is a length limit about GDT, it can only have 8096 descriptors, actually, Linux has the limit of tasks for quite long time, I don't know why it has this limit,
because eliminating this limit seems to be quite simple.
set_tss generates the TSS descriptor and put it into GDT, we can see it set the DPL of descriptor to 0, so only kernel can use this descriptor.
unsignedlonglong
get_tss(void) {
return gdt[CURR_TASK_TSS];
}
LDT
It has been a while since we use GDT, LDT should be fairly easy at this point. LDT is just like GDT, but it is local, every task can have its own LDT, we are going to let every task in
Skelix has two descriptors in LDT, the first one is for the code segment, and the second one is for data and stack segments. Now let's go over the selector format,
we are going to let all tasks work at privilege level 3, that means RPL=11b, and TI=1 indicates this selector refers to a LDT. Unlike GDT, the first descriptor of LDT can be used by users, so
the selector refers to code segment will be 0x7 , and the selector refers to data and stack segments will be 0xF.
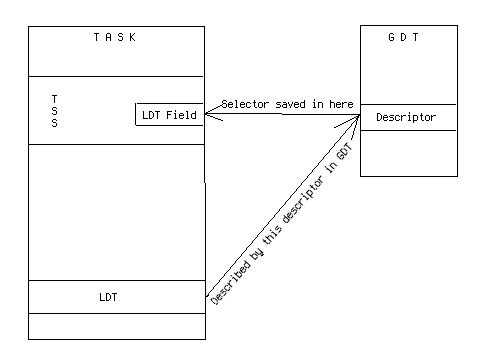
The LDT field in TSS is the selector which refers to an descriptor in GDT, this descriptor describes the LDT. I know it sounds confusing, so let's make it clear,
first we let every task owns a LDT, and this LDT resides in somewhere in memory(we do not concern about virtual memory at this stage), and we need a descriptor to describe
this memory area which contains this LDT, and this descriptor will be put in GDT, and the selector refers to this descriptor will be put into the LDT field in TSS of this task.
The third descriptor of GDT is for current running task's TSS, and the forth descriptor is quite clear, it is for current task's LDT. So theirs selector will be 0x18 and 0x20 respectively.
Like functions relate to TSS, we also have,
It is similar to GDT entries except for the DPL is 3 instead 0.
unsignedlonglong
get_tss(void) {
return gdt[CURR_TASK_TSS];
}
At this moment we will let all tasks have the same LDT content, it means they share the same memory space, that is not a good idea, but I will give them separate memory space by using virtual memory,
it will be introduced in later tutorial.
06/include/task.h
#define DEFAULT_LDT_CODE 0x00cffa000000ffffULL
#define DEFAULT_LDT_DATA 0x00cff2000000ffffULL
These are the LDT descriptors in tasks' LDT, they are almost the same as in GDT, except for the DPL field is set to 3.
I mentioned above, all tasks are linked as a single direction link structure, there are two important pointers, one is the next field in TASK0,
it is the head of the whole link, and a current pointer is used for pointing to the current running task.
Creating and Scheduling
Before any tasks start, we define,
06/task.c
struct TASK_STRUCT *current = &TASK0;
Then we take a look at how a new task is generated,
new_task takes four arguments, the first one is the TASK_STRUCT of new task, the second one is the start entry of the program,
the eip field in TSS will be assigned to this value, so the processor can know where to start this program, the esp0 and esp3
arguments are for the ESP pointer in privilege level 0 and 3, because their selectors have fixed value, 0x10 an 0xf, ss0 and ss are not needed.
memcpy(task, &TASK0, sizeof(struct TASK_STRUCT));
task->tss.esp0 = stack0;
task->tss.eip = eip;
task->tss.eflags = 0x3202;
task->tss.esp = stack3;
task->priority = INITIAL_PRIO;
task->state = TS_STOPPED;
TASK0 are used as a template, we just modify some fields to suits our needs. We change new task state to TS_STOPPED before the
task link is modified correctly. Otherwise, the link can be broken if another new_task is invoked at the same time.
task->next = current->next;
current->next = task;
task->state = TS_RUNABLE;
}
Puts new task in task link.
externvoid task1_run(void);
externvoid task2_run(void);
They are the entries of new tasks, will be introduced in a short while.
staticlong task1_stack0[1024] = {0xf, };
staticlong task1_stack3[1024] = {0xf, };
staticlong task2_stack0[1024] = {0xf, };
staticlong task2_stack3[1024] = {0xf, };
Because we didn't have the memory management done in this tutorial, so we just set up several arrays as task stacks.
void
init(void) {
char wheel[] = {'\\', '|', '/', '-'};
int i = 0;
struct TASK_STRUCT task1;
struct TASK_STRUCT task2;
idt_install();
pic_install();
kb_install();
timer_install(1000);
set_tss((unsignedlonglong)&TASK0.tss);
set_ldt((unsignedlonglong)&TASK0.ldt);
Loads the TASK0's LDT and TSS descriptors to GDT.
__asm__ ("ltrw %%ax\n\t"::"a"(TSS_SEL));
__asm__ ("lldt %%ax\n\t"::"a"(LDT_SEL));
Like you might guess, there are two new registers for TSS and LDT like GDT and IDT, called TR and LDTR,
they are loaded by ltr and lldt. Before we trying to do any task manipulation, we have to load valid values to TR
and LDTR, or you will get an general protection exception.
sti();
new_task(&task1,
(unsignedint)task1_run,
(unsignedint)task1_stack0+sizeof task1_stack0,
(unsignedint)task1_stack3+sizeof task1_stack3);
new_task(&task2,
(unsignedint)task2_run,
(unsignedint)task2_stack0+sizeof task2_stack0,
(unsignedint)task2_stack3+sizeof task2_stack3);
Creates two new tasks, please note that, before creating any new tasks, the interrupt had been enabled.
__asm__ ("movl %%esp,%%eax\n\t" \
"pushl %%ecx\n\t" \
"pushl %%eax\n\t" \
"pushfl\n\t" \
"pushl %%ebx\n\t" \
"pushl $1f\n\t" \
"iret\n" \
"1:\tmovw %%cx,%%ds\n\t" \
"movw %%cx,%%es\n\t" \
"movw %%cx,%%fs\n\t" \
"movw %%cx,%%gs" \
::"b"(USER_CODE_SEL),"c"(USER_DATA_SEL));
Now the kernel has became task TASK0, by a long return it loaded correct EIP and CS and SS and ESP from TASK0 structure, the stack looks like,
Now all tasks are running at privilege level 3, so all other parts that have privilege level higher that that can not be accessed, it gives you some idea of protection. But in Skelix,
I am not going to separate the kernel space from the whole memory, the memory protection will be achieved by the memory mapping of virtual memory. In later tutorial, the user tasks can invoke system
functions via system calls.
Now we have three tasks, then which part will do the switching? Well, as you may guess, we have the timer interrupt in a certain interval, so it is the good and clearly choice.
We have to change the code in timer interrupt like this,
06/timer.c
void do_timer(void) {
struct TASK_STRUCT *v = &TASK0;
int x, y;
++timer_ticks;
get_cursor(&x, &y);
set_cursor(71, 24);
kprintf(KPL_DUMP, "%x", timer_ticks);
set_cursor(x, y);
outb(0x20, 0x20);
cli();
for (; v; v=v->next) {
Traversing the task link, to change priorities of all tasks.
if (v->state == TS_RUNNING) {
if ((v->priority+=30) <= 0)
v->priority = 0xffffffff;
} else
v->priority -= 10;
}
Well, the priority of all tasks will be changed during timer interrupt, the running task get higher numerical priority, that is the lower priority. And the waiting tasks get higher priority.
if (! (timer_ticks%1))
scheduler();
We re-schedule all tasks in two timer ticking.
sti();
}
Let's check out the scheduler,
void scheduler(void) {
struct TASK_STRUCT *v = &TASK0, *tmp = 0;
int cp = current->priority;
for (; v; v = v->next) {
if ((v->state==TS_RUNABLE) && (cp>v->priority)) {
tmp = v;
cp = v->priority;
}
}
Traversing the task link, to find the task which has the highest priority to run, that is the smallest number.
if (tmp && (tmp!=current)) {
current->tss_entry = get_tss();
current->ldt_entry = get_ldt();
We save the TSS and LDT descriptors from GDT to TASK_STRUCT, because some state bits in those descriptors might have been modified by the processor.
Skelix uses a far jump instruction to perform the task switching, the segment part is the TSS selector, and the offset part is simply ignored by the processor.
The TSS_SEL_STR is defined as "$0x18", the quotation marks are included, so C can take all those string fragments into one string.
A & B
At last, let's check out the code of task1_run and task2_run, their entries are written in assembly instead C,
because I do not want to handle the stack change in C function calls. These two tasks actually call other C functions to do the real job.
task1_run:
call do_task1
jmp task1_run
task2_run:
call do_task2
jmp task2_run
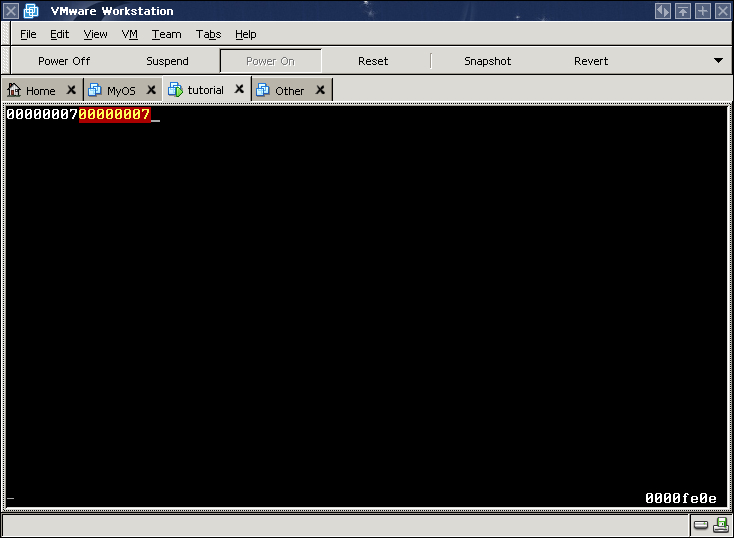
At first, let's check if tasks work in privilege 3 properly, so we call kprintf to print the current CS that task is using, then let it go to busy idle or it will keep printing
it on the screen, and screen scrolls up too fast to see any result.
06/init.c
void
do_task1(void) {
unsignedint cs;
__asm__ ("movl %%cs, %%eax":"=a"(cs));
kprintf(KPL_DUMP, "%x", cs);
for (;;)
;
}
void
do_task2(void) {
unsignedint cs;
__asm__ ("movl %%cs, %%eax":"=a"(cs));
kprintf(KPL_PANIC, "%x", cs);
for (;;)
;
}
Don't forget to add new modules to KERNEL_OBJS in Makefile.
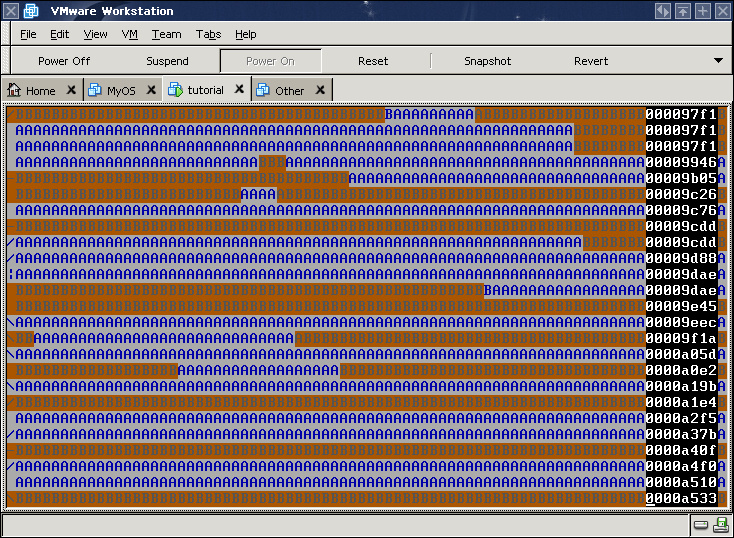
As we can see, first we are using LDT, and the CS has been set to 0x7 correctly, another thing is as we make the kprintf buffer global,
so actually all tasks are sharing same buffer, so output of two tasks might be mixed together when another task starts printting before former task finishes.
Now let them do something fancier, we let two tasks keep displaying different letters,