IDT和ISR
处理器对怎样处理中断和异常一视同仁,当任何一个发生时,处理器终止当前任务的执行并切换到特定的程序段中去以处理中断或异常,这些程序段叫做中断服务程序(ISR)。中断服务程序一旦执行完毕,处理器会回到原来的任务执行。
然而,怎样让处理器找到这些程序段呢?处理器管理了一个表叫做中断描述符表(IDT),它包含了一些描述了怎样访问那些ISR的描述符。就像GDT那样,IDT的物理地址保存在IDTR。
在IDT中的每一个中断和异常都有一个独特的数值,就是被我们重新映射的向量。IDT包含了一组64字节长的描述符,最多有256个描述符在表中。LIDT指令告诉处理器通过寄存器IDTR去找IDT,就想LGDT和GDT的关系那样。
看一下IDT项的格式,

我们熟悉大部分的域,我会在后面详细解释它们。实际上IDT中有好几类的描述符,Skelix使用中断门。
现在处理器知道了当中断或异常发生时到哪里去找处理程序,那么ISR应该是什么样的呢?因为中断或异常终止了正常的执行,并且最后还要回到正常流程中去,也就意味着ISR必须保存正常执行环境,它必须保存所有可能被影响到的寄存器并最终把它们的值重置为进入ISR之前的值。
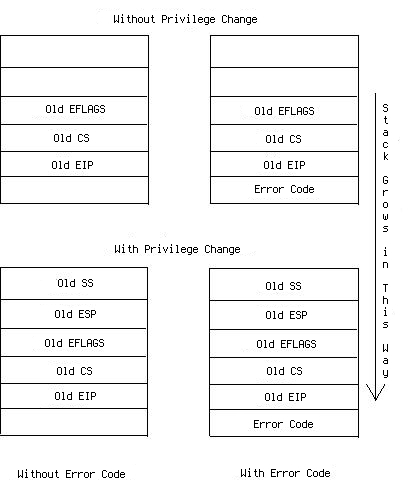
如果ISR代码和当前任务有相同的权限级,那么ISR使用当前堆栈,否则任务切换代码会保存当前SS、ESP、EFLAGS、CS和EIP,并从TSS(后面的教程中讨论它)中载入新的CS、EIP和堆栈,并把保存的寄存器值压入新堆栈中。堆栈切换完成后(如果有的话),处理器把EFLAGS、CS和EIP按这个顺序压入栈中,一些异常还提供了关于错误信息的错误码,这个错误码也必须入栈保存。之后,保存在相应IDT描述符中的CS和EIP被载入。因为我们使用中断门,EFLAGS中的IF标志位将被清除。从ISR返回就要把这个顺序反过来,大体来说……
嗯……还没睡着吧?我猜你大概是糊涂了,所以还是让代码说明一切吧。在上节最后,我们让03/load.s输出“Hello World!”。本节中,我们用一个对C代码的调用取代。
.text
.globl pm_mode
.include "kernel.inc"
.org 0
pm_mode:
movl $DATA_SEL,%eax
movw %ax, %ds
movw %ax, %es
movw %ax, %fs
movw %ax, %gs
movw %ax, %ss
movl $STACK_BOT,%esp
cld
movl $0x10200,%esi
movl $0x200, %edi
movl $KERNEL_SECT<<7,%ecx
rep
movsl
call init
init初始化了一些硬件和系统表,此时它看起来像这样,
04/init.c
unsigned long long *idt = ((unsignedlong long *)IDT_ADDR);
unsigned long long *gdt = ((unsignedlonglong *)GDT_ADDR);
方便起见,我们用一个long long来表示描述符,为了禁掉GCC的警告信息,必须使用在Makefile中使用编译选项--Wno-long-long。
static void
isr_entry(int index, unsigned longlong
unsigned longlong
((unsigned longlong
idt_entry |= (offset<<32) & 0xffff000000000000ULL;
isr_entry填充指定的IDT项,第一个参数是IDT中的索引,第二个参数是ISR地址。
现做一个模板,IDT项看起来像这样,
IDT模板的值是0x00008e0000080000,它表示开始于地址0,使用选择子0x8(内核代码选择子),存在于内存并且DPL为0。
idt_entry |= (offset) & 0xffff;
idt[index] = idt_entry;
填充IDT。
}
static void
idt_install(void) {
idt_install装入了256个ISR。
unsigned int i = 0;
struct DESCR {
unsigned short length;
unsigned long address;
} __attribute__((packed)) idt_descr = {256*8-1, IDT_ADDR};
建立IDTR所用的结构,和GDTR的格式相同。我们需要GCC扩展__attribute__((packed))length,2字节填充,4字节address这样。
for (i=0; i<VALID_ISR; ++i)
isr_entry(i, (unsigned int)(isr[(i<<1)+1]));
for (++i; i<256; ++i)
isr_entry(i, (unsigned int)default_isr);
isr数组存储了所有的ISR,一会儿解释它。深吸一口气,你将看到一个很长的栈帧。VALID_ISR在04/include/isr.h中定义,它指出了IDT中有多少个项是可用的,本节中用的值是32,它是上面介绍的所有中断和异常的总和。
剩余的IDT项被填充为默认ISR,就是在屏幕上改变一个字符来告诉我们有一个为处理的中断发生了。
__asm__ __volatile__("lidt %0\n\t"::"m"(idt_descr));
LIDT将IDT装入IDTR。
}
static void
pic_install(void) {
outb(0x11, 0x20);
outb(0x11, 0xa0);
outb(0x20, 0x21);
outb(0x28, 0xa1);
outb(0x04, 0x21);
outb(0x02, 0xa1);
outb(0x01, 0x21);
outb(0x01, 0xa1);
outb(0xff, 0x21);
outb(0xff, 0xa1);
}
void
init(void) {
int a = 3, b = 0;
idt_install();
pic_install();
a /= b;
}
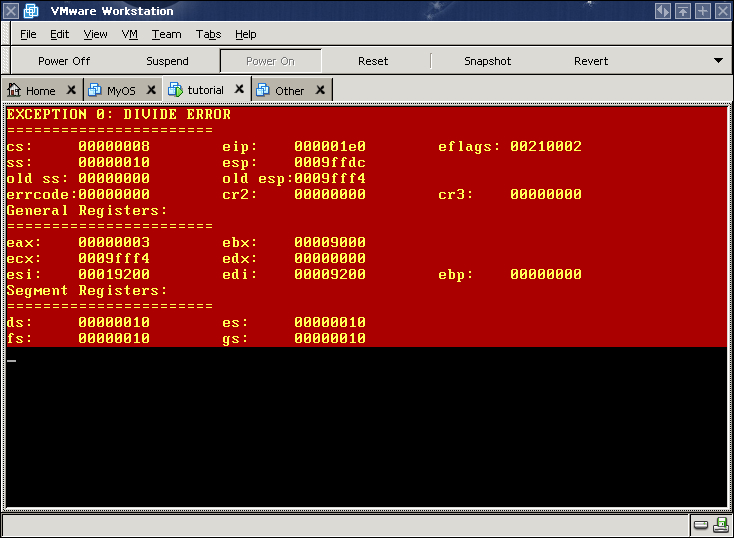
在init的最后,我们做点坏事,让3/0好产生一个除零异常。
我们知道一旦有硬件发送信号到PIC,PIC会通知处理器中断当前执行的代码,然后处理器会找到指定的ISR去做我们想让它做的事。执行完ISR后,它会回到原来的执行流程中去。所以ISR才是我们关心的东西。
04/isr.s
.text
.include "kernel.inc"
.globl default_isr, isr
.macro isrnoerror nr
isr\nr:
pushl $0
pushl $\nr
jmp isr_comm
.endm
宏isrnoerror处理没有错误码的异常,它实际上就是一个外壳,仅仅把当做错误码的值0和ISR索引压入栈。
.macro isrerror nr
isr\nr:
pushl $\nr
jmp isr_comm
.endm
用这两个宏,不论有无错误码,所有的异常都可以被一视同仁。
isr: .long divide_error, isr0x00, debug_exception, isr0x01
.long breakpoint, isr0x02, nmi, isr0x03
.long overflow, isr0x04, bounds_check, isr0x05
.long invalid_opcode, isr0x06, cop_not_avalid, isr0x07
.long double_fault, isr0x08, overrun, isr0x09
.long invalid_tss, isr0x0a, seg_not_present, isr0x0b
.long stack_exception, isr0x0c, general_protection, isr0x0d
.long page_fault, isr0x0e, reversed, isr0x0f
.long coprocessor_error, isr0x10, reversed, isr0x11
.long reversed, isr0x12, reversed, isr0x13
.long reversed, isr0x14, reversed, isr0x15
.long reversed, isr0x16, reversed, isr0x17
.long reversed, isr0x18, reversed, isr0x19
.long reversed, isr0x1a, reversed, isr0x1b
.long reversed, isr0x1c, reversed, isr0x1d
.long reversed, isr0x1e, reversed, isr0x1f
这是在04/init.c中使用的isr数组,它的元素成对定义,例如,divide_error和isr0x00,divide_error是干活的代码段的实际入口,isr0x20是用上面两个宏其中之一产生的代码段,用来维持统一的栈帧。
/*
+-----------+
| old ss | 76
+-----------+
| old esp | 72
+-----------+
| eflags | 68
+-----------+
| cs | 64
+-----------+
| eip | 60
+-----------+
| 0/err | 56
+-----------+
| isr_nr | tmp = esp
+-----------+
| eax | 48
+-----------+
| ecx | 44
+-----------+
| edx | 40
+-----------+
| ebx | 36
+-----------+
| tmp | 32
+-----------+
| ebp | 28
+-----------+
| esi | 24
+-----------+
| edi | 20
+-----------+
| ds | 16
+-----------+
| es | 12
+-----------+
| fs | 8
+-----------+
| gs | 4
+-----------+
| ss | 0
+-----------+
*/
很漂亮的栈帧吧:),所有的异常和中断都使用这个栈帧。
isr_comm:
把所有信息压入栈后,两个宏isrnoerror和isrerror转跳到这里开始一些共有的处理代码。
pushal
pushl %ds
pushl %es
pushl %fs
pushl %gs
pushl %ss
压栈、压栈、压栈……
movw $DATA_SEL,%ax
movw %ax, %ds
movw %ax, %es
movw %ax, %fs
movw %ax, %gs
所有的数据段都载入权限0的选择子。
movl 52(%esp),%ecx
call *isr(, %ecx, 8)
调用ISR干活,52是ISR在栈帧中的索引。
addl $4, %esp # for %ss
ISR结束后,栈回滚。最后一条语句跳过了栈中的SS,因为我们不能像其它寄存器那样把它POP出来。
popl %gs
popl %fs
popl %es
popl %ds
popal
addl $8, %esp # for isr_nr and err_code
跳过栈中的错误码和ISR索引,把栈恢复成ISR调用之前的状态。
iret
isrNoError 0x00
isrNoError 0x01
isrNoError 0x02
isrNoError 0x03
isrNoError 0x04
isrNoError 0x05
isrNoError 0x06
isrNoError 0x07
isrError 0x08
isrNoError 0x09
isrError 0x0a
isrError 0x0b
isrError 0x0c
isrError 0x0d
isrError 0x0e
isrNoError 0x0f
isrError 0x10
isrNoError 0x11
isrNoError 0x12
isrNoError 0x13
isrNoError 0x14
isrNoError 0x15
isrNoError 0x16
isrNoError 0x17
isrNoError 0x18
isrNoError 0x19
isrNoError 0x1a
isrNoError 0x1b
isrNoError 0x1c
isrNoError 0x1d
isrNoError 0x1e
isrNoError 0x1f
为异常生成所有的isr0x??。
default_isr:
incb 0xb8000
movb $2, 0xb8001
movb $0x20, %al
outb %al, $0x20
outb %al, $0xa0
告诉PIC1和PIC2我们的ISR调用已经完成,它们可以接受新的中断。
iret
这是为未用的IDT项准备的默认ISR,我们在04/init.c中用过它,它仅仅是在屏幕上用先有的颜色告诉我们什么刚刚发生,并告诉PIC我们的ISR调用已经完成。这两个outb很重要,否则不会有新的中断进来。