IDT and ISR
The processor handles interrupts and exceptions in the same way, when either of them happens, the processor stops the execution of current task and switch to a specific procedure, called interrupt service routine (ISR) to handle the interrupt or exception. Once the ISR finishes, the control returns to the original task.
However, how can the processor know where to find those routines? The processor manages a table called interrupt descriptor table (IDT) which contains a collection of descriptors
which describes how to access those ISRs. Just like GDT, the physical address of IDT is stored in IDTR.
Each interrupt and exception in the IDT has a unique number, called a vector which has been remapped by us. The IDT is an array of 64-bit long descriptors, there are 256 descriptors maximumly in this table.
LIDT instruction is used to tell processor where to locate the IDT by register IDTR, just like LGDT and GDT we used before.
Let's take a look at the format of an IDT entry,

Most fields are familiar to us, I will explain them later in details. In facts, there are several kinds of descriptors, interrupt gates are used in Skelix.
Now Processor knows where to find the interrupt routine when an interrupt or exception occurs, then what an ISR should look like? Well, because the interrupt or exception stops the normal execution and after the ISR execution the processor has to go back to normal flow, that implies the ISR should reserve the environment of normal execution. It has to save all registers it might affect and restore them before going back to normal execution.
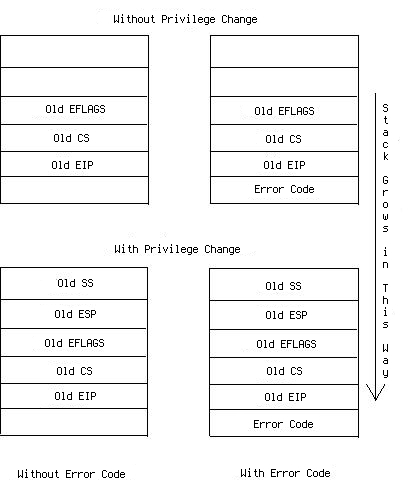
If the ISR code segment has the same privilege level as the currently task, then the ISR uses the current stack, or a stack switch occurs which stores the current
SS, ESP, EFLAGS, CS and EIP,
then loads the new CS and EIP and stack from TSS (we are going to talk about it in later tutorials)
and pushs those saved registers on the new stack. After the stack switch (if there is), the processor pushes EFLAGS, CS and EIP
on the stack in that order, some exceptions provide error codes which reports some information about the error, that error code must be pushed into the stack.
After that, CS and EIP saved in the corresponding IDT descriptor will be loaded. Because we use interrupt gates,
the IF flag in EFLAGS will be cleared. Returning from ISRs just reverses this order, roughly speaking...
Hello? Are you still with me? I guess you might be confused, so let the code talk. At the end of last tutorial, we make 03/load.s prints "Hello World!"
on screen. At this tutorial, we substitute it with a call to C code.
.text
.globl pm_mode
.include "kernel.inc"
.org 0
pm_mode:
movl $DATA_SEL,%eax
movw %ax, %ds
movw %ax, %es
movw %ax, %fs
movw %ax, %gs
movw %ax, %ss
movl $STACK_BOT,%esp
cld
movl $0x10200,%esi
movl $0x200, %edi
movl $KERNEL_SECT<<7,%ecx
rep
movsl
call init
The init function initializes hardwares and system tables etc, at this moment it looks like this,
04/init.c
unsigned long long *idt = ((unsignedlong long *)IDT_ADDR);
unsigned long long *gdt = ((unsignedlonglong *)GDT_ADDR);
Just for convenience, we use one long long to represent one descriptor, for suppressing the GCC warning massage, we have to add a compiler option --Wno-long-long in Makefile.
static void
isr_entry(int index, unsigned longlong
unsigned longlong
((unsigned longlong
idt_entry |= (offset<<32) & 0xffff000000000000ULL;
Function isr_entry fills the specific entry in IDT, the first arguments is the index in IDT, the second argument is the address of the ISR.
It makes a template entry at first, the IDT entry format is,
Template IDT value is 0x00008e0000080000, it indicates it starts at address 0, using selector 0x8(the code selector for kernel), and it's presented and the DPL is 0.
idt_entry |= (offset) & 0xffff;
idt[index] = idt_entry;
Fills in with correct ISR address and puts it into IDT.
}
static void
idt_install(void) {
Function idt_install installs all 256 ISRs.
unsigned int i = 0;
struct DESCR {
unsigned short length;
unsigned long address;
} __attribute__((packed)) idt_descr = {256*8-1, IDT_ADDR};
Creates the structure for IDTR, it has the same format as GDTR. We need a GCC extension __attribute__((packed))length, 2-byte padding, 4-byte address, that is not what we want.
for (i=0; i<VALID_ISR; ++i)
isr_entry(i, (unsigned int)(isr[(i<<1)+1]));
for (++i; i<256; ++i)
isr_entry(i, (unsigned int)default_isr);
Array isr stores all valid ISRs, it will be explained in a short while. Please prepare yourself, there will be a long table of stack frame.... VALID_ISR
is defined in 04/include/isr.h, it indicates how many IDT entries are actually used, it is defines as 32 in this tutorial, it is the number of all exceptions we have discussed.
The rest of IDT entries are filled with a default ISR, which changes a letter on screen lets us know there is an unhandled interrupt.
__asm__ __volatile__("lidt %0\n\t"::"m"(idt_descr));
Loads IDT to IDTR by instruction LIDT.
}
static void
pic_install(void) {
outb(0x11, 0x20);
outb(0x11, 0xa0);
outb(0x20, 0x21);
outb(0x28, 0xa1);
outb(0x04, 0x21);
outb(0x02, 0xa1);
outb(0x01, 0x21);
outb(0x01, 0xa1);
outb(0xff, 0x21);
outb(0xff, 0xa1);
}
void
init(void) {
int a = 3, b = 0;
idt_install();
pic_install();
a /= b;
}
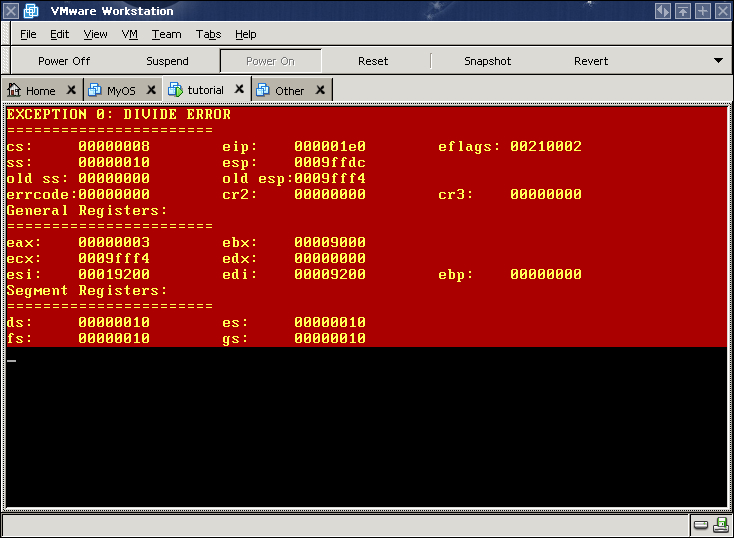
At the end of init, we did something naughty, 3/0 should trigger a Divided by Zero exception.
We know once the hardware sends a signal to PIC, then PIC informs the processor to stop current execution, then processor finds the ISR to do something we want. After execution of ISR, it gives up control and goes back to normal flow. So actually the ISR is what we are concern about.
04/isr.s
.text
.include "kernel.inc"
.globl default_isr, isr
.macro isrnoerror nr
isr\nr:
pushl $0
pushl $\nr
jmp isr_comm
.endm
isrnoerror is a macro for exceptions without error code, it is a wrapper actually, it pushs an extra 0 as error code and the ISR index into stack.
.macro isrerror nr
isr\nr:
pushl $\nr
jmp isr_comm
.endm
With these two macros, all exceptions with or without error code can be treated identically.
isr: .long divide_error, isr0x00, debug_exception, isr0x01
.long breakpoint, isr0x02, nmi, isr0x03
.long overflow, isr0x04, bounds_check, isr0x05
.long invalid_opcode, isr0x06, cop_not_avalid, isr0x07
.long double_fault, isr0x08, overrun, isr0x09
.long invalid_tss, isr0x0a, seg_not_present, isr0x0b
.long stack_exception, isr0x0c, general_protection, isr0x0d
.long page_fault, isr0x0e, reversed, isr0x0f
.long coprocessor_error, isr0x10, reversed, isr0x11
.long reversed, isr0x12, reversed, isr0x13
.long reversed, isr0x14, reversed, isr0x15
.long reversed, isr0x16, reversed, isr0x17
.long reversed, isr0x18, reversed, isr0x19
.long reversed, isr0x1a, reversed, isr0x1b
.long reversed, isr0x1c, reversed, isr0x1d
.long reversed, isr0x1e, reversed, isr0x1f
This is that isr array we used in 04/init.c, its elements defined as pairs, for example, divide_error and isr0x00,
divide_error is the entry of the function which does the real work. isr0x20 is a code snippet which is generated by one of those two macros mentioned before to make a identical stack frame.
/*
+-----------+
| old ss | 76
+-----------+
| old esp | 72
+-----------+
| eflags | 68
+-----------+
| cs | 64
+-----------+
| eip | 60
+-----------+
| 0/err | 56
+-----------+
| isr_nr | tmp = esp
+-----------+
| eax | 48
+-----------+
| ecx | 44
+-----------+
| edx | 40
+-----------+
| ebx | 36
+-----------+
| tmp | 32
+-----------+
| ebp | 28
+-----------+
| esi | 24
+-----------+
| edi | 20
+-----------+
| ds | 16
+-----------+
| es | 12
+-----------+
| fs | 8
+-----------+
| gs | 4
+-----------+
| ss | 0
+-----------+
*/
What an awesome stack frame:). It shows our identical stack frame for all exceptions and interrupts.
isr_comm:
After pushing extra informations into stack, two macros isrnoerror and isrerror jump to here to do some common processing.
pushal
pushl %ds
pushl %es
pushl %fs
pushl %gs
pushl %ss
Pushing, pushing, pushing...
movw $DATA_SEL,%ax
movw %ax, %ds
movw %ax, %es
movw %ax, %fs
movw %ax, %gs
All data segments load privilege 0 selector.
movl 52(%esp),%ecx
call *isr(, %ecx, 8)
Invokes the ISR to do the real work, 52 is the ISR index in that long stack frame.
addl $4, %esp # for %ss
After ISR call, we have to rewind the stack. Last statement skips the SS in stack, because we cannot just POP it as others.
popl %gs
popl %fs
popl %es
popl %ds
popal
addl $8, %esp # for isr_nr and err_code
Skips error code and ISR index in stack, recovers the stack to its original states before this ISR call.
iret
isrNoError 0x00
isrNoError 0x01
isrNoError 0x02
isrNoError 0x03
isrNoError 0x04
isrNoError 0x05
isrNoError 0x06
isrNoError 0x07
isrError 0x08
isrNoError 0x09
isrError 0x0a
isrError 0x0b
isrError 0x0c
isrError 0x0d
isrError 0x0e
isrNoError 0x0f
isrError 0x10
isrNoError 0x11
isrNoError 0x12
isrNoError 0x13
isrNoError 0x14
isrNoError 0x15
isrNoError 0x16
isrNoError 0x17
isrNoError 0x18
isrNoError 0x19
isrNoError 0x1a
isrNoError 0x1b
isrNoError 0x1c
isrNoError 0x1d
isrNoError 0x1e
isrNoError 0x1f
Generates all isr0x?? entries for exceptions.
default_isr:
incb 0xb8000
movb $2, 0xb8001
movb $0x20, %al
outb %al, $0x20
outb %al, $0xa0
Tells PIC1 and PIC2 the ISR has finished, they can accept new interrupts.
iret
This is the default ISR for unused IDT entries, we used it in 04/init.c, it just prints a character with noticeable color on the screen to tell us it just happened
and tell PICs the ISR has finished. Those two outb are important, otherwise no new interrupts can come in.